URBAN-SIM: Revolutionizing Autonomous Micromobility
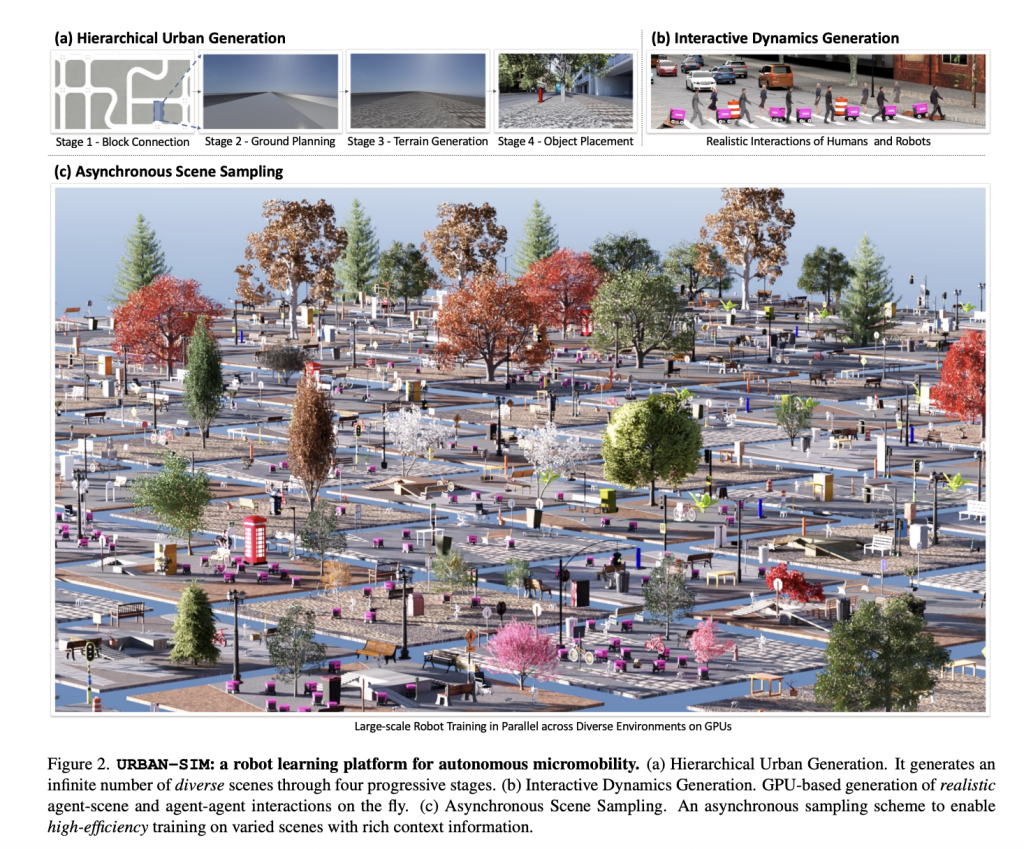
Researchers from UCLA and the University of Washington have developed URBAN-SIM, a groundbreaking simulation platform designed to accelerate advancements in autonomous micromobility. This high-fidelity platform addresses the limitations of existing simulation tools by offering a scalable and realistic representation of complex urban environments. Unlike previous platforms that often focus on indoor settings or simplified road networks, URBAN-SIM procedurally generates diverse, large-scale urban scenes, complete with sidewalks, ramps, stairs, uneven terrain, and intricate details. The platform also features interactive dynamic agent simulation, enabling realistic interactions between autonomous micromobility devices and dynamic obstacles such as pedestrians and cyclists in real-time on GPUs. URBAN-SIM's asynchronous scene sampling strategy allows for parallel training of AI agents across hundreds of unique urban scenes on a single GPU, significantly boosting training speed and improving the robustness of AI policy learning. To benchmark the performance of autonomous micromobility robots, URBAN-BENCH, a comprehensive task suite, was created. This suite includes tasks focused on urban locomotion (navigating various terrains), urban navigation (avoiding static and dynamic obstacles), and a challenging kilometer-scale urban traverse task that incorporates a human-AI shared autonomy model. This model allows human intervention in complex scenarios while letting the AI handle routine navigation, offering a balance of safety and efficiency. The platform supports a variety of robot types, highlighting their strengths and weaknesses across different tasks. URBAN-SIM leverages NVIDIA's Omniverse and PhysX for realistic visual rendering and precise physics, making it a powerful tool for training and evaluating autonomous micromobility systems. The platform's scalability and training efficiency improvements (up to 26.3% compared to synchronous methods) underscore its potential to significantly advance the field. Future work includes ROS 2 integration and sim-to-real transfer techniques, paving the way for seamless real-world deployment.
The intersection of ai automation micromobility represents a transformative shift toward intelligent transportation solutions that could reshape urban mobility forever.
The integration of chatgpt automation micromobility systems represents a significant leap forward in creating intelligent, responsive urban transportation networks.